International Newsletter vol.32 2010/6
6.1. 2010 株式会社 FORUM8
http://www.forum8.com
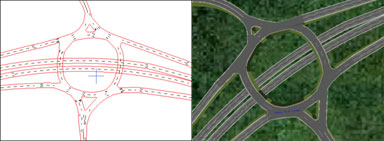
UC-win/Road for RoboCar(R) 插件 开发中! 该插件是连接UC-win/Road与车辆机器人平台scale model车辆RoboCar的虚拟现实VR模拟系统。 具有驾驶模拟功能的虚拟现实软件UC-win/Road与搭载了机器人技术的车辆机器人平台<Robocar>连接的VR模拟系统。该VR模拟系统可以在VR空间的道路上通过驾驶控制实车10分之一规模的scale model车辆。 利用VR技术表现的虚拟现实可设置精致的空间、丰富的交通环境以及脚本并进行试乘。 是可以广泛应用于车辆机器人的研究开发、尖端安全汽车以及ITS的研究开发的系统。 ◆车辆机器人+虚拟现实 UC-win/Road for RoboCar(R)视频 ('10.05.17刊载)
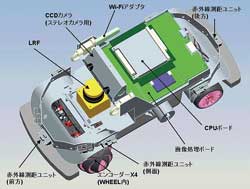
scale model车辆×机器人技术(ZMP公司制)RoboCar(R) ■充实的环境识别平台
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
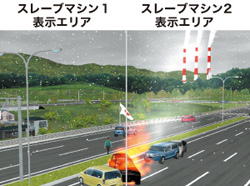
UC-win/Road Cluster 插件 最新发布 该插件是在UC-win/Road中同步多台电脑在多台显示器上输出映像的系统。(可显示4ch以上) 可广泛应用于360度环幕模拟器以及会议室、控制室模拟等。 ●特点 ・操作简便 ・结构灵活 ・无功能限制 ・性能改善 ・通用系统 : ●集群系统构筑 局域网连接多台电脑,在1台电脑计算模拟所必要的计算。计算结果传送至各显示器,在各显示器中进行描绘处理。在该系统进行模拟计算的机器称为服务器,显示器称为从机。 计算和描绘处理流程如下。
集群构成最主要的基本运作是在一台服务器进行模拟计算、在从机只进行描绘处理。因为处理是可以分担的,从而可提高系统性能。 以往的UC-win/Road中交通流以外的所有处理是在一个线程中进行的,实现本功能的计算与描绘只能是独立进行的。集群构成与UC-win/Road标准版中比以往优化使用CPU与多核的结果提高了性能,特别是3D树木、旗、火与烟、MD3特征人物动画。
服务器向各从机传送的数据为移动要素相关的位置信息与属性。各从机是接收数据更新3D空间后进行后处理的,而对于如3D树木、布、雨和雪等持有复杂形状的要素因为信息量过多无法高速传送。为此对于这些对象物服务器先传送计算中必不可少的最低限的参数后在各从机进行计算。 ●功能说明 UC-win/Road标准版中追加了集群系统必要的功能,搭载了UC-win/Road标准版所有的功能。初始设置以外的所有操作均可在服务器上进行,从而将各从机上的操作减少到了最低程度。 下述设置与功能就可实现集群系统的操作
●性能基准 为确认该系统有效性进行性能试验的结果得出的结论是与通常系统相比提高了性能、减小了对进入集群的电脑台数的影响。另一方面比较了集群与标准版的4频道构成,其结果性能得到了平均140%的改善。比较15台从机与标准版1频道得出的结论是性能大约改善了20%。
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
UC-win/Road 力反馈对应驾驶模拟器 最新发布 组合SENSO-Wheel(转向装置控制器)・CarSim在UC-win/Road上体验接近于实车的转向装置操作。 ●主要特长/功能
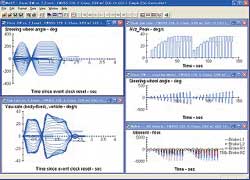
CarSim 8.02 介绍 CarSim是株式会社Virtual Mechanics产品,是在乘用车以及小型商用车的多种驾驶条件和环境条件中分析和评价动态举动的车辆运动模拟器。 ■CarSim的特长
CarSim中标准搭载了200种测试行驶脚本示例、100以上的车辆特性模型事例。
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||






















- 背景:Car Testing China是一个兼顾技术研讨和展览的专业会议,会议将邀请中日两国和海外汽车开发厂商及学术机构的专家,提供有关该技术领域最新动态的报告,同时还为汽车制造厂商和开发机构提供展示柜台。从以汽车测试,检测,控制以及仿真技术为主题的Car Testing Japan 2008的盛况,足以窥见汽车行业对软件技术所寄托的希望之大。作为Car Testing Japan的姊妹会议,Car Testing China 2010正是为了促进中日汽车开发技术的交流和发展而召开的。
- 名称: Car Testing China 2010
- 新能源时代的汽车实验、测量、控制、仿真技术的最新动态及未来展望
- 展期: 2010年7月21日(周三)、22日(周四)
- 会场: 北京国际会议中心(400人、100人演讲室、展览会场内设100个展间)
- 主办: Car Testing China执行委员会(委员长:申 铁龙 / 上智大学 教授)
- 协办: 电计贸易(上海)有限公司、株式会社IMPRESS R&D
- 预定来场人数:约3000人
| ●UC-win/Road http://vr.forum8.co.jp/chinese/ | |
| ●UC-win/Road 驾驶模拟器 http://www.forum8.co.jp/chinese/uc-win/road-drive-cn.htm | |
| ●UC-win/Road ECO驾驶 插件 http://www.forum8.co.jp/chinese/uc-win/road-ECOdrive-cn.htm |
哈尔滨·2010.9.16~17
背景:当前,计算机应用与信息技术已成为工程设计最活跃的生产力,是企业技术自主创新的基础条件,是提升工程设计单位核心竞争力,占领同行业制高点的关键。只有坚持不懈地发展计算机与信息技术,全过程、全方位实现信息化,全面提高生产与管理的效率和水平,才能推动工程设计的不断创新,才能更好地适应我国现代化建设的需要。为此,主办单位定于2010 年9 月16~17 日在哈尔滨市召开第十五届全国工程设计计算机应用学术会议。这次会议将秉承以往会议的宗旨,与时俱进,沟通信息,交流成果,相互学习,加强合作,取长补短,共同提高。
主办:中国土木工程学会计算机应用分会
中国工程图学学会土木工程图学分会
中国建筑学会建筑结构分会计算机应用专业委员会
黑龙江省土木建筑学会
黑龙江省建设厅科学技术委员会
承办:哈尔滨工业大学土木工程学院
我公司相关产品:
| ●UC-win/Road http://vr.forum8.co.jp/chinese/ | |
| ●UC-win/Road for SaaS http://www.forum8.co.jp/chinese/uc-win/RoadforSaaS-cn.htm | |
| ●UC-win/Road Cluster http://www.forum8.co.jp/chinese/uc-win/Road-cluster-cn.htm |
详细培训信息请点击进入
http://www.forum8.co.jp/chinese/fair-cn-4.htm
== 2010年6月、7月软件产品免费技术培训会详细信息 ==
● Engineer's Studio&UC-win/FRAME(3D) 体验型培训会
2010年6月3日(周三)
时间安排∶13:30-16:30
09:30-10:10 公司与产品功能的介绍
10:10-10:50 软件界面的介绍
10:50-11:00 休息
11:00-11:50 操作实习(上):
3跨连续钢架箱型桥,动力,非线性计算模型的制作,计算,结果调查
11:50-12:00 午前的问题回答
12:00-13:00 午餐
13:00-14:30 操作实习(上) :
3跨连续钢架箱型桥,动力,非线性计算模型的制作,计算,结果调查
14:30-14:40 休息
14:40-16:10 操作实习 (下):
3跨连续钢架箱型桥,动力,非线性计算模型的制作,计算,结果调查
16:10-16:30 答疑、问卷调查
地点∶上海
软件详细信息请参照
UC-win/FRAME(3D)
http://www.forum8.co.jp/chinese/uc-win/frame3d-cn.htm
Engineer's Studio
http://www.forum8.co.jp/chinese/uc-win/EngineersStudio-cn1.htm
●Maxsurf体验型培训会
2010年6月24日(周四)
时间安排:
13:30-15:40 Maxsurf的概要说明与操作说明
15:50-16:20 相关系统的介绍(maritimeEXODUS・SMARTFIRE・UC-win/Road)
16:20-16:30 質疑応答,填写调查表
地点:上海
软件详细信息请参阅
http://www.forum8.co.jp/chinese/uc-1/others/maxsurf-cn.htm
主办:株式会社 FORUM8以及上海分公司
综合窗口:株式会社 FORUM8
TEL:81-3-5773-1888
FAX:81-3-5720-5688
E-Mail:li-o@forum8.co.jp
联系人:李恩实
上海培训地点:富朗巴软件科技(上海)有限公司
地址:上海市浦东新区浦东南路855号世界广场23楼E室
TEL:86-21-6859-9898
FAX:86-21-6859-9897
E-Mail:info-china@forum8.com
联系人:中村 圭祐
根据我们的基本经营理念,为了向客户提供更优质的产品与服务,积极开展软件许可管理、宣传活动等,通过这些活动收集的个人信息我们将进行保密和严格保管。公司将努力提高个人信息的安全性,以确保个人信息管理安全。
★ 用户权利 ★
您对收到的电子邮报可以根据个人需要提出以下要求
・要求拒收
・要求删除邮箱信息
・要求变更邮箱地址
请在回信中注明其要求。
此电子邮报的收件人信息以2010年6月1日12点的登录信息为准。
★点击进入电子邮报服务申请页面
http://www.forum8.co.jp/chinese/p-mail-cn.htm
株式会社 FORUM8
東京都目黒区上目黒2-1-1 中目黒GT TOWER 15层
TEL:+81-3-5773-1888
FAX:+81-3-5720-5688
mail :li-o@forum8.co.jp
http://www.forum8.co.jp/chinese/